There are three types of matches that can be played in VRC Tournaments.
In a head-to-head match, two alliances (red and blue) each composed of two teams will play a 15-second autonomous period (pre-programmed) followed by a 1-minute 45-second driver controlled period.
There are two types of skills match that teams compete in as well. These are autonomous coding skills matches and driver skills matches.
In an autonomous coding skills match, one team with one robot will have 1-minute to score as many points as they can with pre-programmed commands.
In a driver skills match, one team with one robot will have 1-minute to score as many points as they can using their remote to control the robot.
The rules for skills matches are slightly different than the rules for regular head-to-head matches. These will be discussed in a different session.
Pins
There are 63 pins used in Override.
4 red/blue pins start the match in predetermined field locations
20 red/yellow pins
2 are preloads
10 are match loads
8 start in predetermined locations
20 blue/yellow pins
2 are preloads
10 are match loads
8 start in predetermined locations
19 yellow/yellow pins
2 are match loads
17 start in predetermined locations
The pins are the main scoring element in this year’s game. Robots will place these in neutral and alliance goals during the match.
Cups
There are 56 cups used in Override.
20 cups are match loads (10 for red and 10 for blue)
24 cups start on the field in predetermined locations (gray side up)
12 cups start on the field in predetermined locations (clear side up)
The cups are used to build stacks of pins in goals. Strategy is needed because only the parts of pins showing through the clear side of a cup or above the top cup will count for points.
Goals
There are 9goals where pins can be scored.
4 alliance goals (2 red and 2 blue)
5 neutral goals (4 short and 1 tall)
Any team may place pins and cups on any of the neutral goals. Alliances can only place pins in the alliance goals of their color.
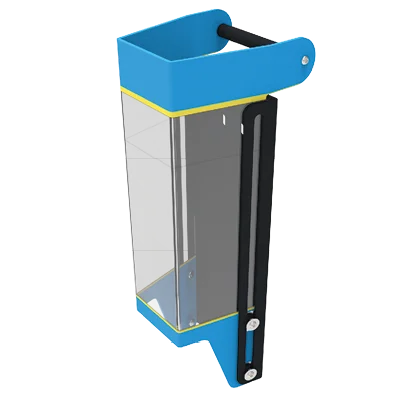
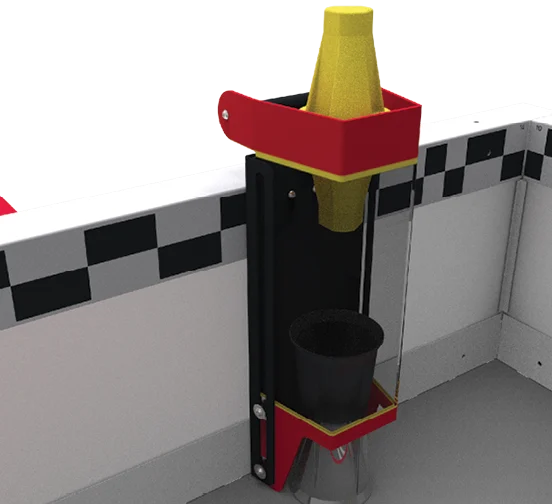
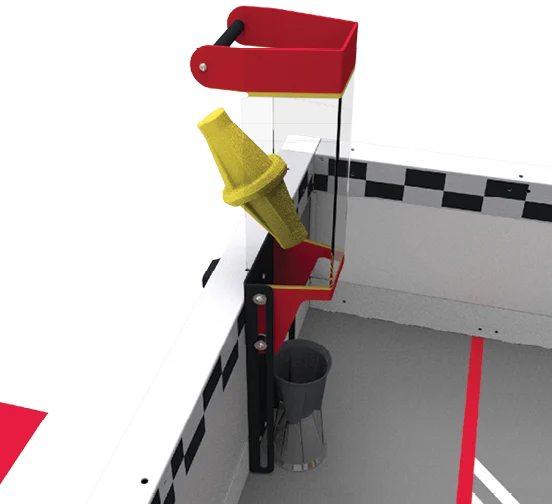
Loaders
There are 4 loaders (2 per alliance) attached to the walls of the field. These are used by drive team members to add match load pins and cups into the field during the driver control period of the match.
You may place a single pin, a single cup, or a nested cup and pin into the top of the loader (when the loader is in the “down” position) or the back of the loader (when the loader is in the “up” position).
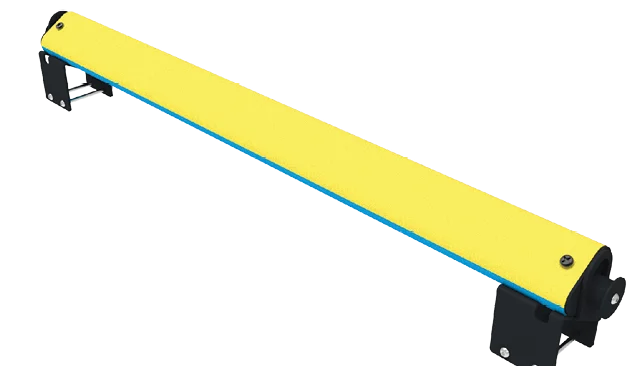
Toggles
There are 4 toggles attached to the walls of the field. These are used to “own” all of the yellow scored pins in a quadrant of the field.
Each toggle has 3 sides (yellow, blue, and red).
If yellow is showing, no points are awarded for that quadrant’s yellow pins.
If blue is showing, blue earns 10 points for each visible yellow pin section in that quadrant.
If red is showing, red earns 10 points for each visible yellow pin section in that quadrant.
Teams and Alliances
Teams can be made of one or more students who compete together for a season. Team members can have many different roles (designers, builders, programmers, drivers, documenters, strategists). Adults cannot fulfill any of these roles.
An alliance is a pre-assigned group of two teams that are paired together for a given match at a tournament. Two teams will form the red alliance and two teams will form the blue alliance for each match. During qualifying matches, these alliances are randomly paired. Before elimination matches begin, teams will choose alliance partners who stay together for the remainder of the tournament.
Drive Team Members
Your team can have as many students as you wish. However, there can only be one, two, or three students from each team who stand in the alliance station during a match. These are called drive team members. These students do not all have to operate a controller. Some drive team members support the driver by keeping track of the time or what the opposing alliance robots are doing. Adults cannot be drive team members or shout instructions to drive team members during a match.
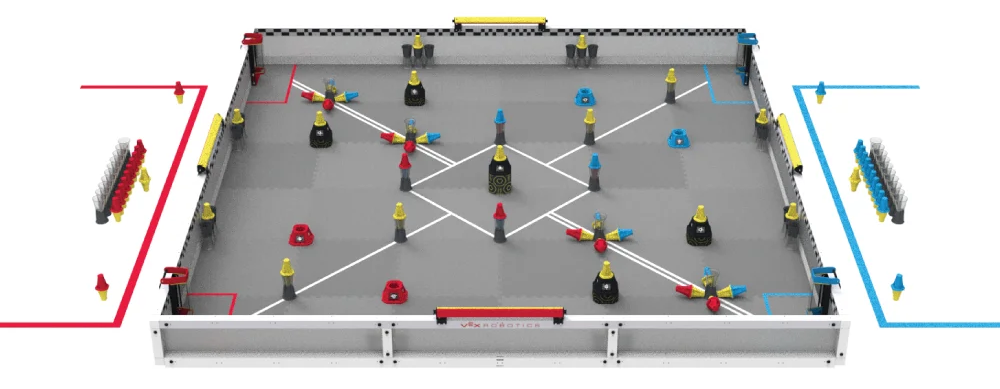
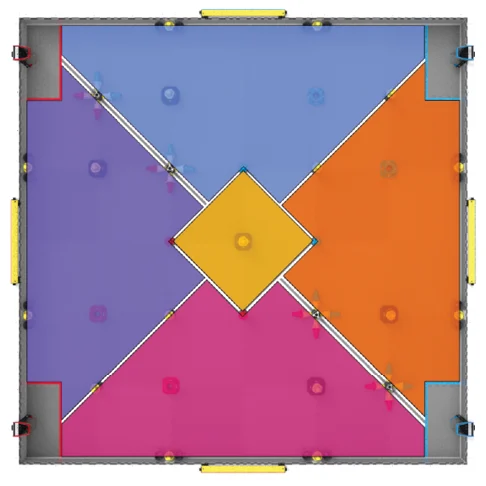
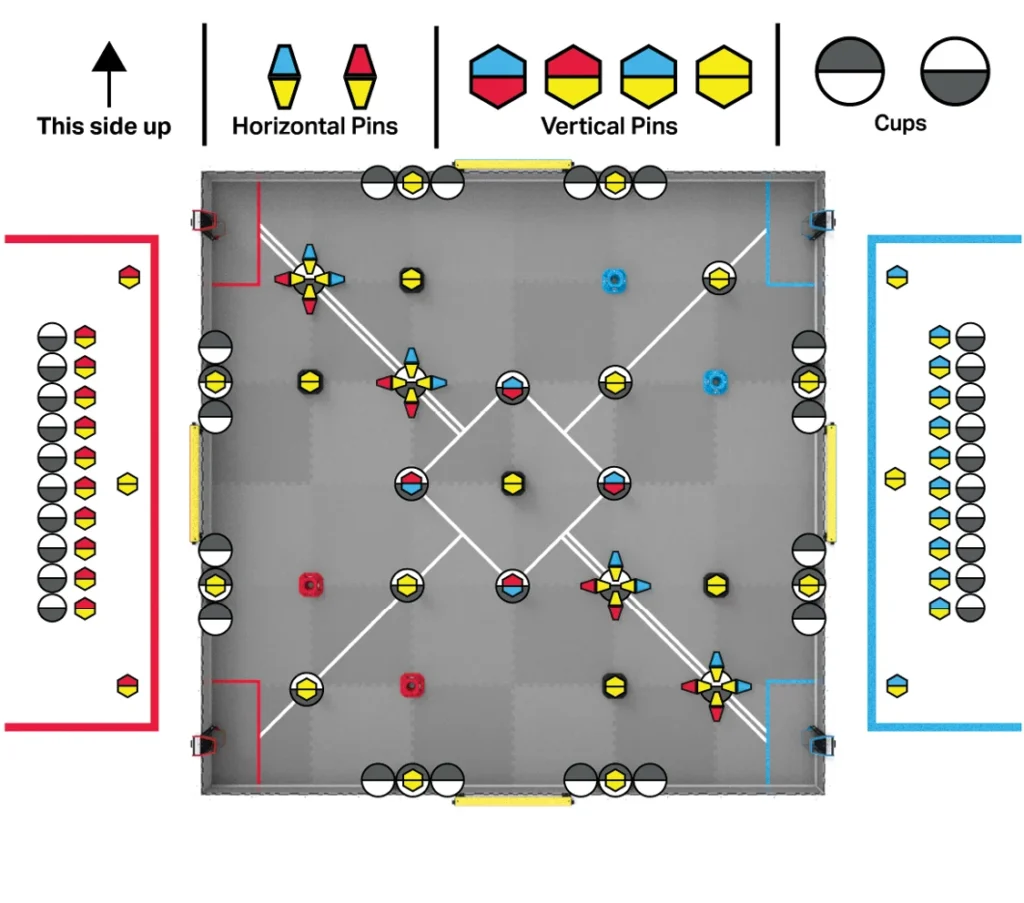
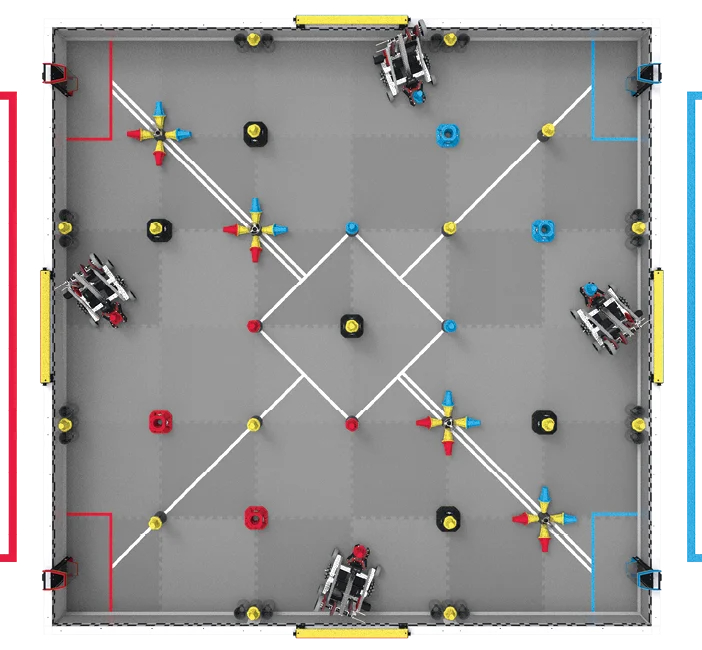
Field Layout
Up to three drive team members from each team can stand in the alliance stations (marked in orange) on the left and right sides of the field. The red alliance station is on the left (from the audience view) and the blue alliance is on the right.
The 9 goals are marked in green, the loaders are marked in white, and the toggles are marked in pink.
The starting positions of the pins and cups are also shown below, with icons representing which side of the pins and cups is on top or bottom.
Legal Starting Positions
At the start of each match, alliance robots must be placed in a way that meets all of the following criteria:
not touching any cups or pins other than the one preload
not touching any goal,loader, load zone, or toggle
no touching any other robot
not in the same quadrant as another robot
completely stationary
touching the field perimeter wall and field tiles on the alliance’s side of the autonomous line (double white-stripe)
The robots must begin each match with dimensions smaller than 18″ x 18″ x 18″. They can expand once the match has started.
Preload Blocks
Prior to the start of a match, each robot will be allowed to use one of their alliance color/yellow pins as a preload. A preload is placed so that it is:
contacting one robot of the same alliance color
not contacting the same preload as another robot
not touching any other pins or cups
not touching a goal, loader, load zone, or toggle
If a robot is not present for the match, that robot’s preload may used as a match load during the driver control period.
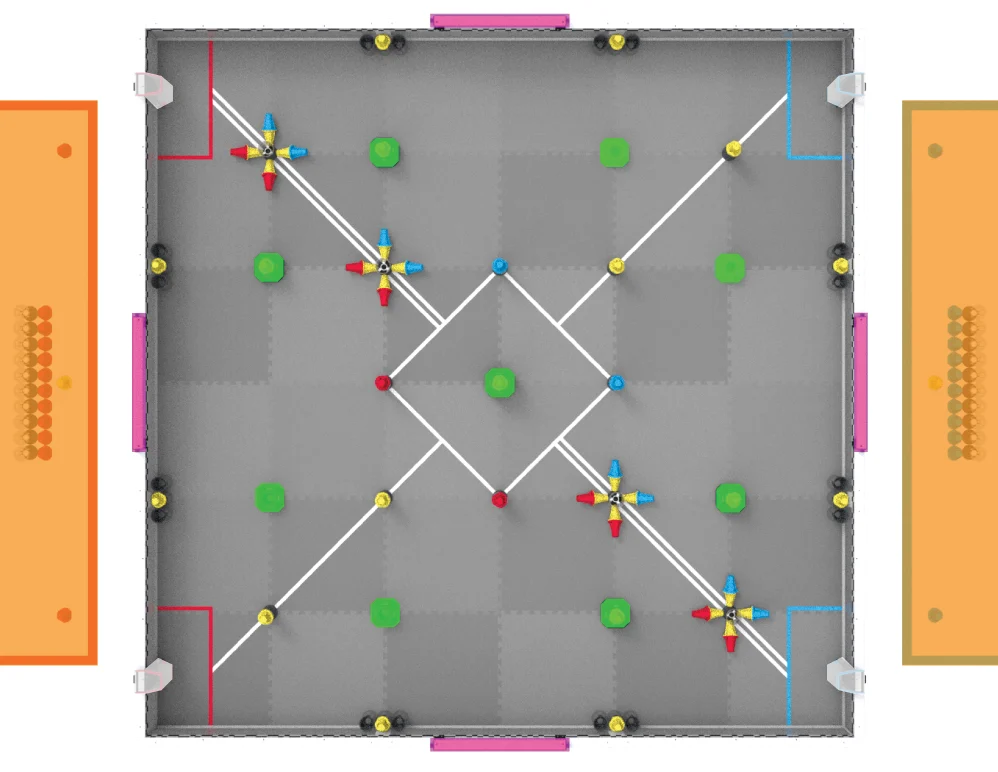
Autonomous Bonus
At the end of the 15-second autonomous period, once all pins, cups, field elements, and robots on the field come to a rest, the alliance with the most points will be awarded 12 points. In the case of a tie, each alliance will receive 6 points.
Points for being in the midfield are not considered when determining the autonomous bonus.
Robots cannot cross the autonomous line (the double white tape line running across the middle of the field) during the autonomous period. Doing so will result in the opposing alliance receiving the the 12 point bonus. If both alliances cross the line, no points will be awarded to either alliance.
Robots are allowed to touch any of the 20 scoring objects placed on the autonomous line (circled in red in the image below). Robots may also enter the midfield. These interactions are “at your own risk”. This means you should expect that your opponents may do the same thing.
Robots cannot contact the pins or cups on the other side of the autonomous line or robots on the opposing alliance’s side unless the opponent is interacting with the autonomous line or midfield. This would result in the opposing alliance receiving both the 12 point autonomous bonus AND an autonomous win point.
Intentional, strategic, or egregious violations will be considered major violations and should result in a disqualification from the match.
Autonomous Win Point
Winning a qualifying round match gives each team in the winning alliance 2 “win points” to improve their overall ranking. (A tie gives each alliance 1 “win point”.) An additional win point can be earned by any alliance that completes assigned tasks by the end of the autonomous period of a qualifying round match. To earn the autonomous win point (AWP) in Override, an alliance must do the following tasks without breaking any rules:
score at least 7 pins for your alliance (not including any pins scored on opponent’s side)
at least 3 goals have at least 2 pins scored for your alliance (not including any pins scored on opponent’s side)
neither robot is touching the field perimeter
Possession
A robot can posses a maximum of 1 cup and 1 pin. An object is considered possessed by a robot if a change in direction of the robot would result in controlled movement of the object. This is often because:
the robot is carrying the object
the object is in a concave section of the object
the robot is holding the object against the tiles or a field element
Plowing (pushing) multiple pins and cups with a flat or convex part of your robot is allowed.
Endgame
The endgame is the final 10 seconds of the match. Alliances can earn points by ending the match with any part of their robots breaking the plane of the midfield (the outer edge of the white tape box in the center of the field). Each robot in the midfield will earn 8 points.
Additionally, any placed yellow pins in the midfield goal will be owned by the alliance with the most robots in the midfield at the end of the match. If both alliances have the same number of robots in the midfield, the yellow pins do not score points.
During the endgame period, any robot in the midfield is limited to a vertical expansion of 18 inches.
Violations:
A violation is any act which breaks one of the rules in the game manual. Usually, if something is not listed as a violation in the rules, then it is legal.
Minor Violations are any violation which does not result in a disqualification. These are usually accidental, momentary, or non match effecting violations. They usually result in a verbal warning from the head referee during the match which helps the team avoid it escalating into a major violation.
Major Violations are violations which do result in a disqualification. These are usually intentional or egregious rule violations which are clearly stated in the game manual. All match affecting violations are also major violations. Multiple minor violations within a match or tournament may be considered a major violation at the head referee’s discretion. The head referee will explain any major violations to the teams at the end of the match and issue the disqualification.
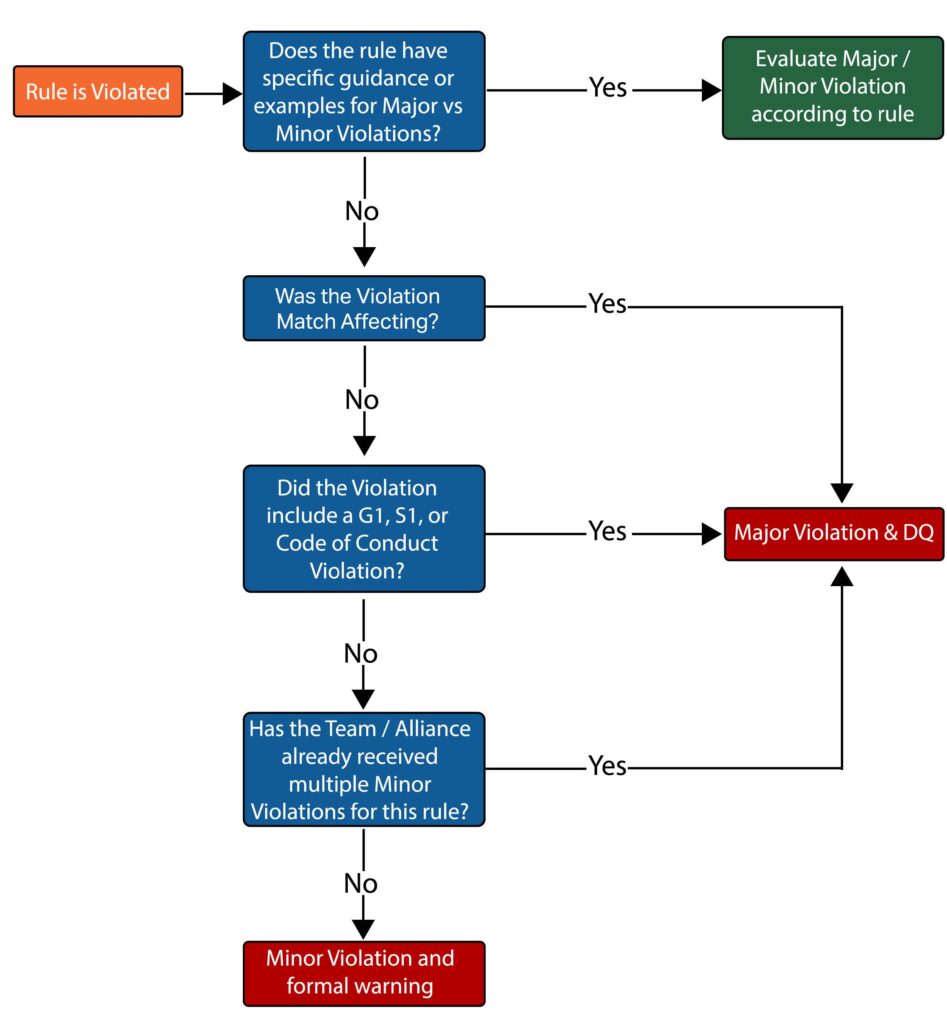
Match Affecting violations are ones which change who wins and loses a match. Once a match is complete and the scores have been calculated, if the team who committed the violation won the match and most likely would have lost if they had not committed the violations, they will be disqualified and the “losing” alliance will be awarded the 2 win points. In a qualifying round match, the alliance partner of the DQed team will also be awarded the 2 win points since it is not fair for them to be punished for the penalty of a randomly assigned partner. In an elimination round match, both teams on the alliance would be disqualified.
Disqualifications are always issued at the end of the match, never during.
The head referee will use the following flow chart to help determine if a violation is match affecting:
Safety Violations:
A disablement is a penalty issued to any team for a safety violation. A team that is disabled is not allowed to operate their robot for the remainder of the match, and the drive team member(s) will be asked to place their controller(s) on the ground.
If at any time it is determined that a robot or team ‘s actions are unsafe or have damaged a field element, scoring object, or the field, the offending team may receive a disablement and/or disqualification at the discretion of the head referee. Disabled robots will need to be re-inspected before taking the field in future matches.
A robot that is completely out of the playing field will be disabled for the remainder of the match.
Holding:
Holding is when a robot meets any of the following criteria during a match:
trapping (limiting the movement of an opponent to a small area of the field without an avenue for escape)
pinning (preventing the movement of an opponent through contact with the field perimeter, field or game element, or another robot)
lifting (controlling an opponent’s movements by raising or tilting the opponent’s robot off of the foam tiles)
A robot may not hold an opposing robot for more than a 3-count. Once a count begins, the two robots must be separated by at least 2 feet for a 5-count. If a team resumes holding the same robot within this 5-count, the original count will resume from where it ended.
Entanglement with another robot is not the same as holding. Some incidental entanglement may be expected, but intentional acts of grabbing, hooking, or attaching to an opponent robot may be deemed a major violation (and disqualification) at the head referee’s discretion.
A robot that is not attempting to move or escape is not considered trapped or pinned.
If you miss any of the questions, now is the time to figure out why. Look back through the rules and the information listed in this session for clarification.