Gears are used for many things. They can change the direction of movement, type of movement, speed and torque.
Two or more gears on drive shafts with their teeth meshed form a gear train. We call the input (the gear the turning power is put INTO) a driver gear. It is the gear that our motor will be connected to. We call the output (the gear BEING turned by the input gear) the driven gear. It is the gear that will be connected to our wheel.
If the driver gear and the driven gear are the same size, then they will turn at the same speed. However, gears that are side by side will turn in opposite directions.
With three or more gears in a gear train, the inner gears are called idler gears. These can change the direction that the driver and driven gears travel, but will not change their speed. If you have an odd number of gears, the outer gears travel in the same direction. If you have an even number of gears, the outer gears travel in the opposite direction.
When two connected gears are different sizes, they don’t turn at the same speed.
We can increase speed if the driver gear is larger than the driven gear. We call this “gearing up“. Think about what would happen if an adult and a small child were holding hands and walking down the sidewalk. The adult’s legs would be moving slowly, but the child’s legs would have to move very quickly in order to keep up.
We can decrease speed if the driver gear is smaller than the driven gear. We call this “gearing down“.
Torque is the amount of force available to make an object turn. Speed and torque are inversely related. That means when a gear train increases speed, torque is decreased. When a gear train decreases the speed, torque is increased.
If we give the input gear in a gear train a fixed amount of power (for example, if the motor is running at 100% power), then a gear train which is geared up will have the output gear moving faster but weaker. A gear train which is geared down will have the output gear moving slower but stronger.
slower but stronger
faster but weaker
Challenge:
Task 1:
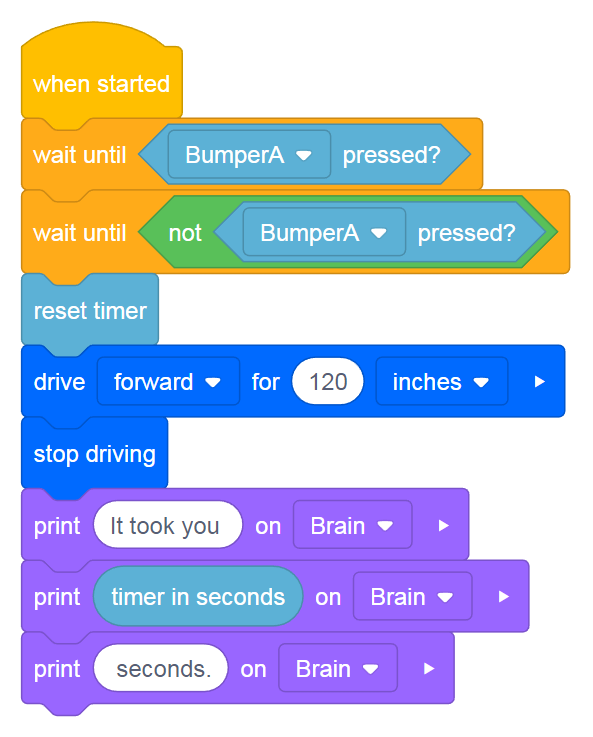
Use a timer to display the amount of time it takes for your robot to travel 10 feet.
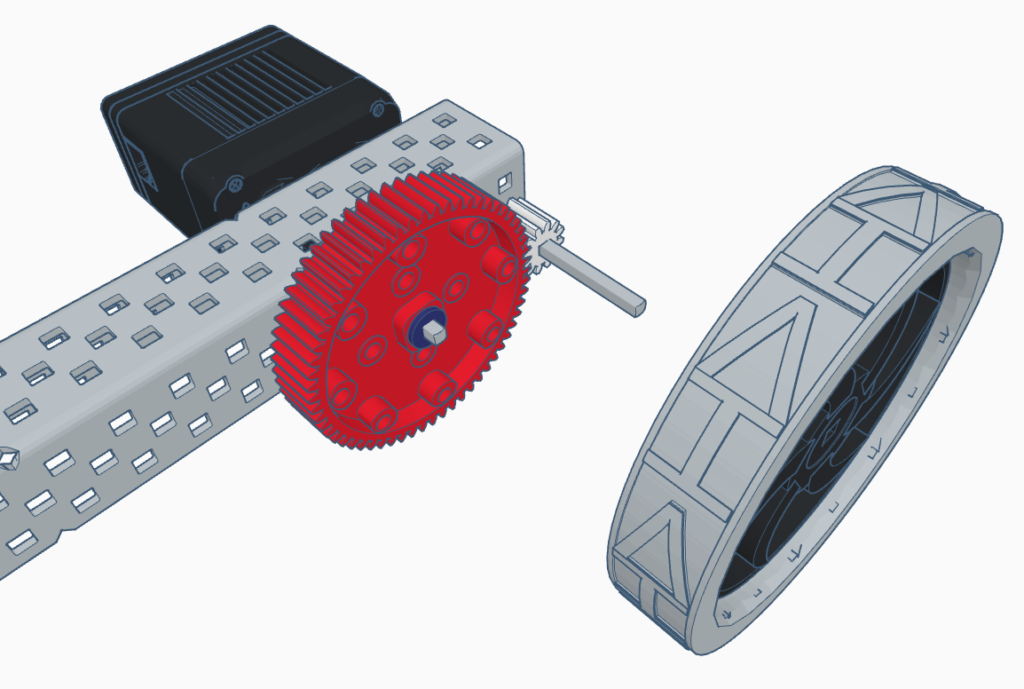
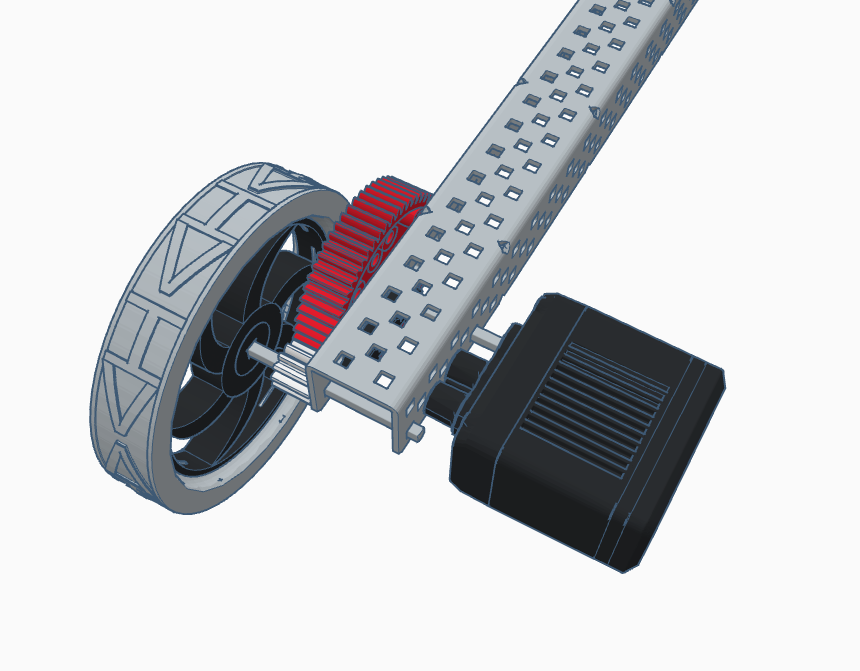
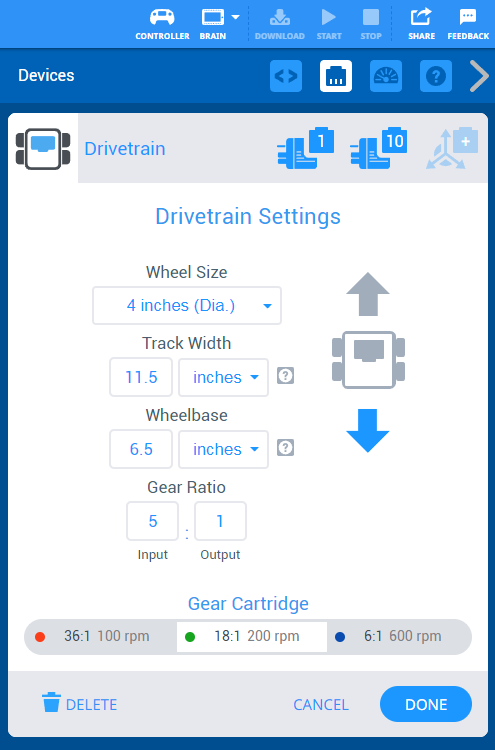
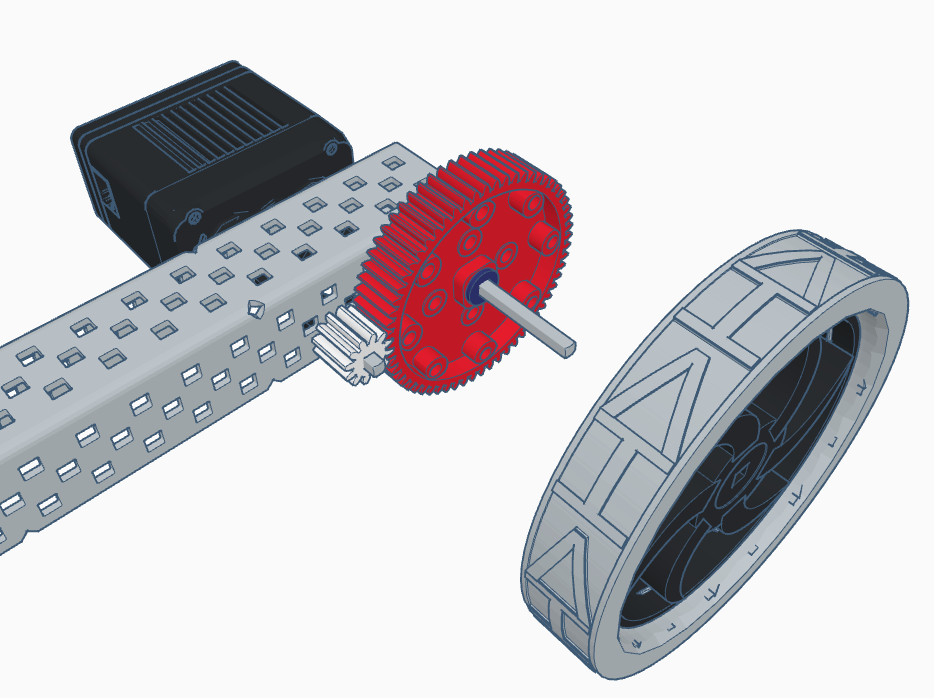
Then redesign the Clawbot by adding a 60-tooth gear to the motor axle shaft and attach the wheel to a connected 12-tooth axle shaft. (This is gearing up for speed.) Adjust the gear ratio setting in the drive train to use 5 for the input and 1 for the output. Drive the same 10 foot distance and compare the time it takes.
Also, try pushing a heavy object with your robot to see if it is strong enough to move it.
Task 2:
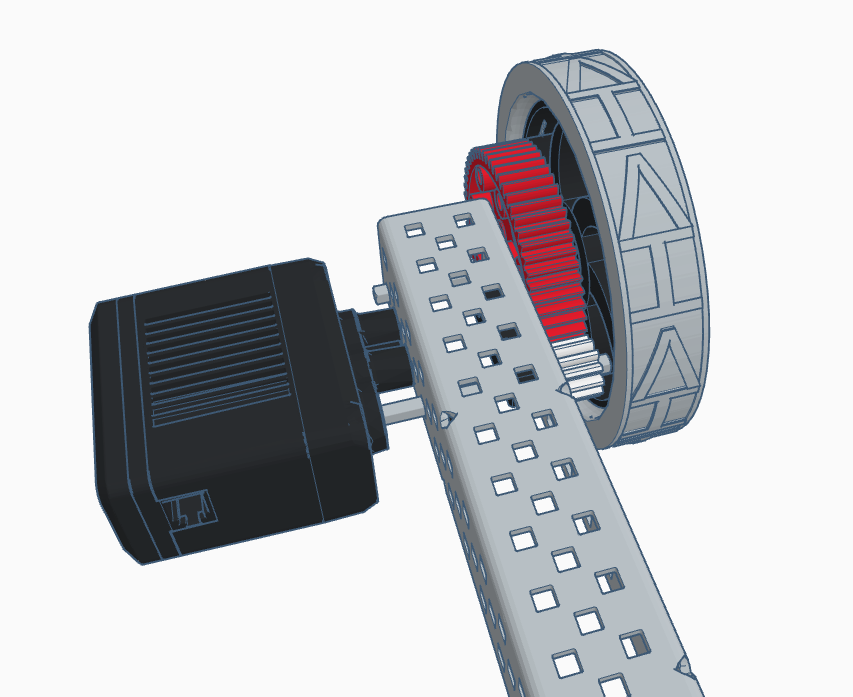
Now redesign the Clawbot by moving the 60-tooth gear to the wheel axle shaft and the 12-tooth gear to the motor axle shaft. (This is gearing down for torque.) Adjust the gear ratio setting in the drive train to use 1 for the input and 5 for the output. Drive the same 10 foot distance you did in task 1 and compare the time it takes.
Now, try pushing a heavy object with your robot to see if it is strong enough to move it.